
Michigan State University’s robotic fish learns to glide
The water quality monitoring robot under development at Michigan State University has garnered national media attention as a robotic fish. But at first glance, the contraption sitting in the basement of the MSU engineering building on a recent February morning looked more like a model single-engine aircraft than a fish.
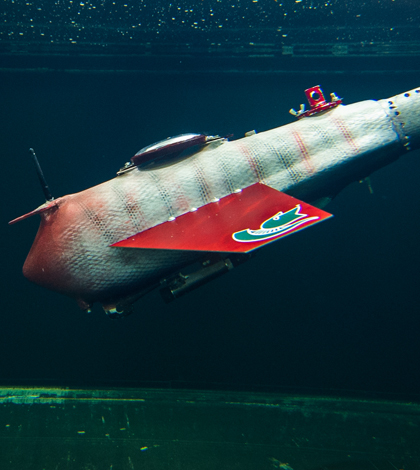
Two flat wings stick straight out from the round tapered body, which ends in a rudder-like tail.
“It does look like an airplane,” said Xiaobo Tan, associate professor of electrical and computer engineering at MSU. “It could be made more fishlike, but I think the purpose here is not really mimicking fish.”
Instead, the purpose is to develop a water quality monitoring robot with maneuverability and intelligence not yet available in the commercial market. Tan is a principal investigator on the project, which began when he and some students implanted artificial muscle into a toy fish — the sort of thing engineers do for fun. It’s since grown into a National Science Foundation-funded effort to develop a robot capable of autonomous data collection throughout a waterbody, either on its own or in concert with others like it.
Earlier prototypes of the robot had a body plan similar to actual fish. Though it now looks more like an airplane with a Turner Designs fluorometer tucked in its hull, it’s fish-like qualities become apparent once it’s in the water.
The robot, called Grace (“Gliding Robot ACE”), has a few ways of getting around a lake or river. In its swimming mode, the robot floats at the water’s surface and the tail flaps back and forth, propelling it forward. Though its new wings aren’t very fishy, they’re essential to the physics of the robot’s gliding mode, which allows it to travel long distances underwater without using much energy.
When gliding, pumps within the hull suck in water until the robot starts to sink nose first. At this angle, the wings cut through the water and give Grace forward motion. Once the dive is complete, the pumps squeeze water out of the hull until it regains buoyancy. It ascends nose first, the wings again pushing it forward.
This zig-zagging pattern keeps the fish moving forward when it needs to cover a lot of water. But Tan also emphasized the utility of another gliding pattern in which the robot sinks indefinitely with the tail held at an angle. This sets the fish on a corkscrewing path to the bottom of waterbody. By heading down instead of forward, the water quality senors can capture a vertical profile of whatever variable they’re measuring.
“When the robot goes down, it actually kind of spirals,” Tan said. “That’s very important for water column sampling.”
At this stage of development, the robot can be either actively steered or given a programmed route to follow. But the ultimate goal is a robot that needs as little human input as possible.
“For environmental monitoring, we really envision an autonomous mode.” Tan said. “Which means you set a task and the robot will worry about how to do it.”
For that kind of operation, the robot will have to be able to use information from its GPS, compass, gyroscopes and accelerometers to understand where it is and how it’s posed in a waterbody, and then compare that to where it needs to be. Based on the results of that comparison the robot will choose its own route and mode of locomotion to best complete the task.
Grace is still a developing project, and attaining such a high level of automation will be the next phase of research for Tan and the students he advises. Getting there is important for one of the most interesting potential applications of the technology. Tan envisions fleets of these robots working in concert to analyze lakes, streams and coastal environments.
“If you’re talking about 10, 15, 20 spread out in a lake trying to collect data in a collaborative way, there’s no way one or two people can run all these robots simultaneously,” Tan said. “They have to figure out what to do by themselves. And that’s not impossible, I think.”
Top image: Xiaobo Tan’s lastest verison of the robotic fish glides in a tank in his lab (Credit: G.L. Kohuth)
One Comment
Leave a Reply



Pingback: Michigan State's Robotic Glider To Study Great Lakes Fish - Lake Scientist