
Chasing Soft Sea Creatures with Self-folding Origami Robots
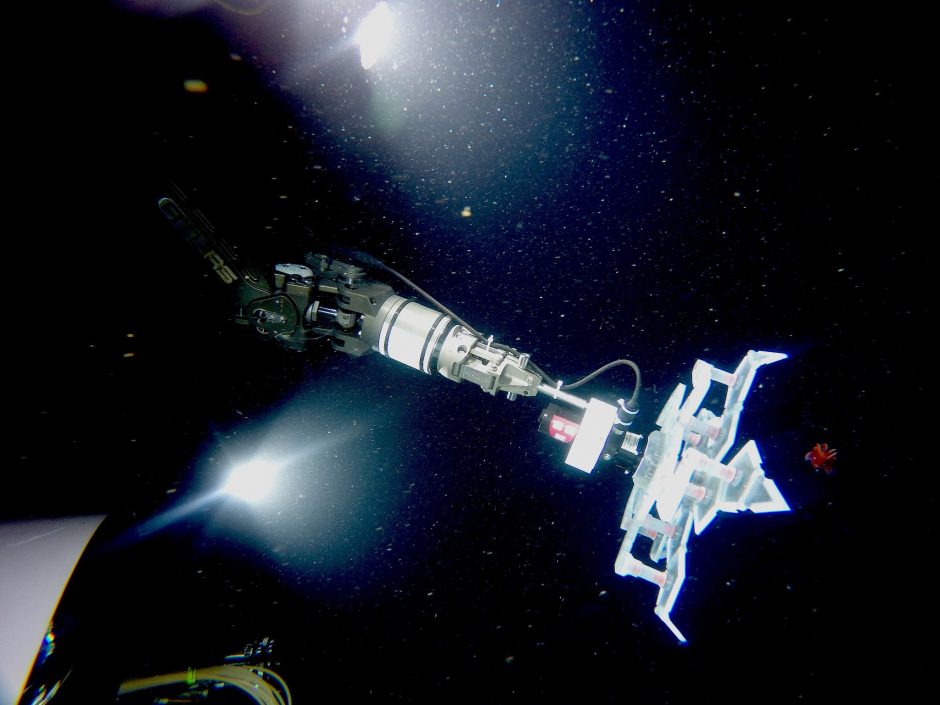
The sampler is extended from an underwater vehicle. (Credit: Wyss Institute at Harvard University)
One of the biggest challenges scientists who study sea creatures face is the problem of where and how to study their subjects. In situ study is critical to many lines of research, especially to anything that touches upon conservation. However, marine fauna are often very difficult to study in place, especially for species that live very deep underwater.
Recent work from mechanical engineer Zhi Ern Teoh, PhD, and colleagues, offers a potential solution for those studying the denizens of the deep: self-folding polyhedron robots inspired by origami. Dr. Teoh spoke with EM about the work.
Inspired by origami
“It all started when I was a grad student at the Harvard Microrobotics Lab,” explains Dr. Teoh. “I was trying to build insect-scale robots, really tiny robots. We build robots at that scale in 2D, and then we fold them into three-dimensional shapes.”
Unfortunately, this process is painstaking, at best, involving hunkering down, looking through a microscope, and using tweezers to fold tiny things.
“We spend hours doing that, and the success rate is not too good. It’s really, really hard to fold things at that very small scale,” remarks Dr. Teoh. “That led me to think about how to create a mechanical system that can fold 2D sheets into three-dimensional objects with as few actuators as possible. So that was the genesis, or at least what motivated this idea.”
This led to the proof of concept creation: a self-folding dodecahedron that can quickly “capture” even very delicate marine organisms without hurting them in the deep open waters they call home.
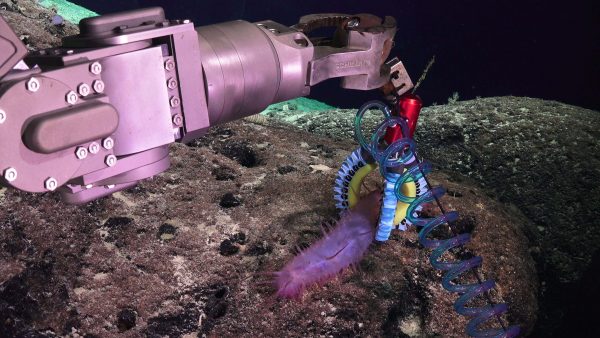
Soft origami-inspired robot collects living, soft sample from ocean floor. (Credit: Dr. Teoh, via communication)
This is especially useful for studying the very fragile species that frequently live deep underwater. Many of the millions of undersea animals are gelatinous and soft, and many species remain unknown, as yet. Traditional techniques for collecting and studying these creatures, not to mention plants, can accidentally harm or even kill them.
This wasn’t a problem Dr. Teoh was working on—until a colleague asked him about his folding devices and their potential for underwater use.
“This morphed into an underwater sensing device, I think, because the lab I was in is very multidisciplinary,” comments Dr. Teoh. “We have materials scientists, biologists, mechanical engineers, electrical engineers, all working in close proximity to each other, so we hear about each other’s problems. Every week one of us will present what we’ve been doing, and after one of my presentations to the group, my co-author Brennan Phillips, a mechanical engineer with a marine biology background, approached me and said, ‘Hey, can you scale up what you’re doing 20 or 30 times? I want to see if we can interact with soft sea creatures in a different way.’ So that’s how we got here.”
Interdisciplinary innovation
That interdisciplinary environment has proven to be an environment that’s conducive to innovative new research.
“I think that’s key to a lot of exciting work; really exciting work occurs where the boundaries of different disciplines meet,” remarks Dr. Teoh. “This is one good example.”

Lead author Zhi Ern Toeh with the device. (Credit: Wyss Institute at Harvard University)
In the testing process, the team mounted the sampler on an underwater vehicle and deployed the ROV and sampler into the Monterey Canyon, a deep water area off the California coast. There the sampler quickly captured and released various specimens, including jellyfish, octopi, and squid. The team successfully tested the device at depths up to 700 meters, although the self-folding polyhedrons—both free of internal voids and incompressible—can withstand greater depths and corresponding pressures.
“The whole purpose of the exercise was to show that we can encapsulate soft features without killing them,” details Dr. Teoh. “So it was more of a catch and release, and I think this is the first step toward more sophisticated underwater sensing devices, sort of like a proof of concept.”
The team knew that deploying the samplers without their own sensors would be risky for the creatures they were encapsulating.
“We had to think about some way of sensing if a creature’s appendages were in between the panels; you don’t want to fully close when an animal is halfway between them, that would be bad for them,” comments Dr. Teoh. “We tried to reduce this risk by making the edges of the sampler out of softer silicone as opposed to a hard material. So the idea here is that if anything is trapped, the soft silicone edge would reduce the risk of an appendage being severed.”
Dr. Teoh admits that he wasn’t sure on test day whether the device would succeed.
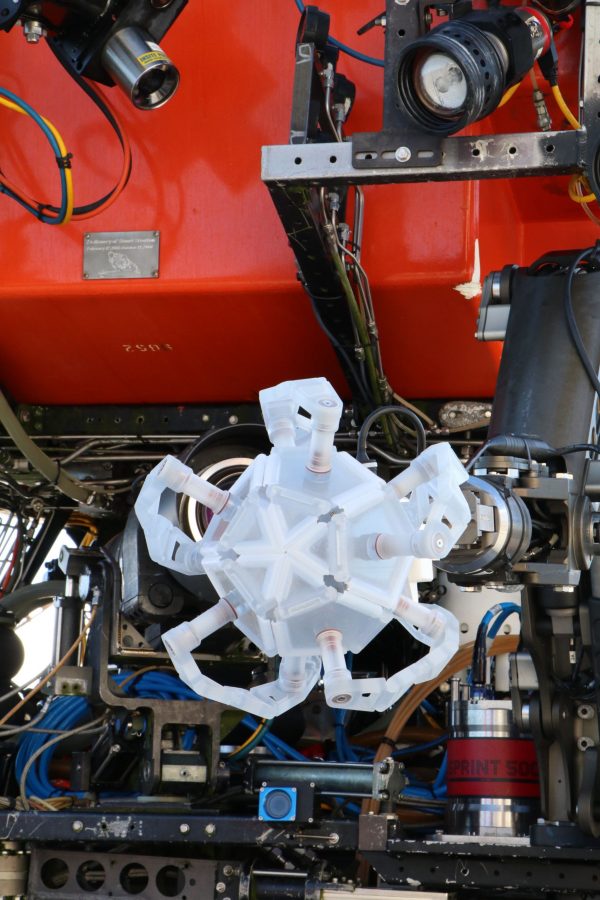
The device mounted on an underwater vehicle. (Credit: Wyss Institute at Harvard University)
“It’s funny, because when we brought the device down to the ship and started to look at the ROV, everything is made out of metal, really strong stuff, and here you have this really flimsy looking thing,” recalls Dr. Teoh. “We weren’t sure if lowering it down into the sea might break it; then we wouldn’t have a chance to do anything. I think we were incredibly fortunate to have good weather and really careful pilots who took a lot of precautions during the mission.”
Next steps and new iterations
Interesting new materials are likely coming next for the team in terms of the sampler’s development.
“In the short term, I think you’re going to see a more rugged design,” Dr. Teoh describes. “Currently, it is made out of 3D printed material. It’s great for prototyping, but it’s not very durable, it’s actually quite brittle. So I think we really do want to switch materials and think about making the sampler out of metals such as titanium or stainless steel, or if weight proves to be a big concern as we start to scale the device up in size, we might even consider using carbon fiber.”
Ultimately, although this test case was guided by a human pilot, these tough little origami-inspired creations will probably deploy by themselves.
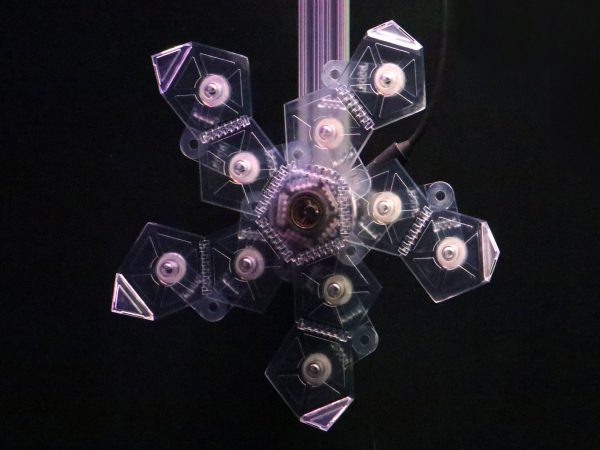
The sampler unfolds. (Credit: Wyss Institute at Harvard University)
“It depends on how smart we make them,” states Dr. Teoh. “Right now as designed, it’s completely manually operated. They require a human in the loop to open or close the mechanism. But if we think about creating a tool to help scientists sample the oceans, I think we definitely want the system to be able to detect when something is within its grab zone. So a sensor to sense that is definitely something we have to think about.”
In fact, for future work the team hopes to incorporate DNA sequencing technology, touch sensors, and built-in cameras, all to enable more interaction between the sampler and the marine creatures it “captures.”
“The ocean is 70 percent of the earth’s surface; there are so many things that remain to be studied and explored and discovered,” remarks Dr. Teoh. “Imagine if we can make this a more rugged, more intelligent system. It would be really cool if we could deploy thousands into the sea and use these mini encapsulating labs to study sea creatures in situ.”
Ongoing research will hopefully enable the team to refine the devices for deployment in other environments too.
“One of my dreams is that somebody would take this thing and maybe make a deployable satellite in space or a telescope, that would be pretty neat.”
To watch this robot collect samples, go here.
Top image: The sampler is extended from an underwater vehicle. (Credit: Wyss Institute at Harvard University)


0 comments